阴影映射
前言
在之前的章节中,我们只用到了一个管线、渲染通道和子通道来渲染场景。 然而,实际渲染流程往往需要多个图形管线协作完成,例如实现阴影、镜面反射和后处理等。
在本章中,我们将通过 Phong 光照模型,渲染一个带光照和阴影的简单场景。 我们将使用最简单的 阴影映射 方式来实现阴影效果,先生成光源视角下的深度图,然后在渲染主场景时使用该深度图来判断片元是否被遮挡。
由于渲染目标不同,需要分别用两个渲染通道处理深度图和主场景。
如果目标相同,可以使用一个渲染通道和多个子通道来实现。
基础代码
请下载下方的代码并编译运行:
本场景使用了 GAMES202 课程作业1的模型,建议阅读本章前先完成阴影映射部分的理论学习。
自行移动摄像机位置,你将看到类似下面的效果:

本章节基础代码基于“C++模块化”章节的示例二代码,主要做出如下修改:
- 添加
LightUBO,用于传递光源信息。 - 修改模型读取代码,读取地面和Marry人物模型,以及材质数据。
- 添加实例缓冲区,存储模型自身的材质数据。
- 使用推送常量控制是否纹理采样。
- 创建深度图所需图像和采样器,但未使用。
- 修改着色器,添加简单的 Phong 光照计算逻辑。
深度图
在渲染阴影时,我们需要先生成一个深度图,记录光源视角下的场景深度信息。 基础代码已经创建了深度图所需的图像资源和采样器,但尚未真正使用。
前言部分提到,我们需要使用两个渲染通道来分别处理深度图和主场景的渲染。 因此需要创建一个新的图形管线和渲染通道用于生成深度图,此管线无需绘制最终颜色、只需记录深度信息,因此无需颜色附件和片段着色器。 深度图像将作为附件添加到第一个渲染通道。
在第二个渲染通道中,我们将使用该深度图来判断片元对于光源是否可见,需要使用采样器来读取深度图像。 因此图像和采样器在第二个管线将使用描述符集以供着色器访问,而非附件的形式。
渲染通道
现在创建一个新的渲染通道用于生成深度图。
1. 阴影渲染通道模块
现在创建一个 ShadowRenderPass.cppm 模块文件,负责创建阴影渲染通道和帧缓冲区。
module;
#include <memory>
#include <vector>
export module ShadowRenderPass;
import vulkan_hpp;
import Device;
import ShadowDepthImage;
export namespace vht {
class ShadowRenderPass {
std::shared_ptr<vht::Device> m_device{ nullptr };
std::shared_ptr<vht::ShadowDepthImage> m_shadow_depth_image{ nullptr };
vk::raii::RenderPass m_render_pass{ nullptr };
std::vector<vk::raii::Framebuffer> m_framebuffers;
vk::Extent2D m_extent{}; // 使用阴影深度图的宽度和高度
public:
explicit ShadowRenderPass(
std::shared_ptr<vht::Device> device,
std::shared_ptr<vht::ShadowDepthImage> shadow_depth_image)
: m_device(std::move(device)),
m_shadow_depth_image(std::move(shadow_depth_image)) {
m_extent.width = m_shadow_depth_image->width();
m_extent.height = m_shadow_depth_image->height();
create_render_pass();
create_framebuffers();
}
[[nodiscard]]
const vk::raii::RenderPass& render_pass() const { return m_render_pass; }
[[nodiscard]]
const std::vector<vk::raii::Framebuffer>& framebuffers() const { return m_framebuffers; }
[[nodiscard]]
const vk::Extent2D& extent() const { return m_extent; } // 命令缓冲录制时需要使用
private:
// 创建渲染通道
void create_render_pass() {
}
// 创建帧缓冲
void create_framebuffers() {
}
};
}
有一点值得注意,此渲染通道不需要用到“交换链”,更准确的说是不需要获取交换链图像的大小。
这是因为深度图不用于屏幕显示,第二次渲染使用采样器读取时使用 [0,1] 表示图像范围,因此不需要考虑交换链的图像大小。
此外,它也不需要在窗口变化时重建。
深度图大小可根据需求设定,它在 ShadowDepthImage.cppm 模块的类成员中指定。
越大的深度图,最后表现出的阴影效果越精细,但会消耗更多的显存和计算资源。
2. 创建渲染通道
渲染通道与帧缓冲的创建过程与之前类似,但此通道只需要一个深度附件,无需颜色附件。
void create_render_pass() {
vk::AttachmentDescription depth_attachment;
depth_attachment.format = m_shadow_depth_image->format();
depth_attachment.samples = vk::SampleCountFlagBits::e1;
depth_attachment.loadOp = vk::AttachmentLoadOp::eClear;
depth_attachment.storeOp = vk::AttachmentStoreOp::eStore; // 阴影深度图像通常需要存储
depth_attachment.stencilLoadOp = vk::AttachmentLoadOp::eDontCare;
depth_attachment.stencilStoreOp = vk::AttachmentStoreOp::eDontCare;
depth_attachment.initialLayout = vk::ImageLayout::eUndefined;
depth_attachment.finalLayout = vk::ImageLayout::eShaderReadOnlyOptimal; // 后续需要让着色器读取
vk::AttachmentReference depth_attachment_ref;
depth_attachment_ref.attachment = 0;
depth_attachment_ref.layout = vk::ImageLayout::eDepthStencilAttachmentOptimal;
vk::SubpassDescription subpass;
subpass.pipelineBindPoint = vk::PipelineBindPoint::eGraphics;
subpass.setPDepthStencilAttachment( &depth_attachment_ref );
vk::RenderPassCreateInfo create_info;
create_info.setAttachments( depth_attachment );
create_info.setSubpasses( subpass );
m_render_pass = m_device->device().createRenderPass( create_info );
}
注意附件信息,我们要保留深度图像的存储操作,以便后续渲染时可以读取。
而且后续要让第二个管线的着色器读取,因此需要将深度图像的最终布局设置为 eShaderReadOnlyOptimal。
3. 创建帧缓冲
帧缓冲的创建与之前类似,但需要使用阴影深度图像的视图以及尺寸。
void create_framebuffers() {
vk::FramebufferCreateInfo create_info;
create_info.renderPass = m_render_pass;
create_info.width = m_extent.width;
create_info.height = m_extent.height;
create_info.layers = 1;
for (const auto& image_view : m_shadow_depth_image->image_views()) {
create_info.setAttachments( *image_view ); // 记得加 * 操作符
m_framebuffers.emplace_back(m_device->device().createFramebuffer( create_info ));
}
}
4. 依赖注入
我们后续将在 Drawer 模块中使用此渲染通道,现在为其添加成员:
...
import ShadowRenderPass;
...
class Drawer {
...
std::shared_ptr<vht::ShadowRenderPass> m_shadow_render_pass{ nullptr };
...
std::shared_ptr<vht::ShadowRenderPass> shadow_render_pass, // 构造函数参数
...
m_shadow_render_pass(std::move(shadow_render_pass)), // 构造函数初始化
...
};
回到 App.cppm 模块,初始化对象,并为 Drawer 注入依赖:
我们使用共享指针管理资源,可以不那么在意声明顺序,但你需要注意创建顺序。
...
import ShadowRenderPass;
...
class App {
...
std::shared_ptr<vht::ShadowRenderPass> m_shadow_render_pass{ nullptr };
...
init_shadow_render_pass();
std::cout << "shadow render pass created" << std::endl;
...
void init_shadow_render_pass() { m_shadow_render_pass = std::make_shared<vht::ShadowRenderPass>( m_device, m_shadow_depth_image ); }
...
void init_drawer() {
m_drawer = std::make_shared<vht::Drawer>(
...
m_shadow_render_pass,
...
);
}
};
5. 测试
进阶内容的任务多且复杂,建议在每个小阶段完成后都进行测试,尽早发现问题。
着色器
现在需要编写深度图渲染通道的着色器,此管线只需要顶点着色器(因为我们仅记录深度,不需要绘制色彩)。 我们需要在定义着色器中使用“光源”的视角变换矩阵,将顶点位置转换到光源视角下,以便管线后续自动绘制光源视角的场景深度图。
1. 顶点着色器
光源的 MVP 矩阵已经在 LightUBO 中定义,你可以自行调整。
着色器代码直接使用相同的数据格式即可,后续将使用 UBO 传递光源信息。
现在可以在 shaders 文件夹下创建一个新的着色器文件 shadow.vert,内容如下:
#version 450
layout(location = 0) in vec3 inPosition;
layout(location = 1) in vec3 inNormal;
layout(location = 2) in vec2 inTexCoord;
layout(std140, binding = 0) uniform UBO {
mat4 model;
mat4 view;
mat4 proj;
vec3 lightPos;
vec3 lightColor;
vec3 viewPos;
} ubo;
void main() {
gl_Position = ubo.proj * ubo.view * ubo.model * vec4(inPosition, 1.0);
}
顶点输入可以参考输入装配模块的内容,但深度图不需要实例数据(模型的材质信息),因此我们后续只传顶点数据。
2. CMake脚本
在 shaders 目录的 CMakeLists.txt 中添加新的着色器编译规则:
# ...
set(SHADOW_SHADER ${SHADER_DIR}/shadow.vert)
# ...
set(SPIRV_SHADOW ${SHADER_DIR}/shadow.spv)
# ...
add_custom_command(
OUTPUT ${SPIRV_SHADOW}
COMMAND ${Vulkan_GLSLC_EXECUTABLE} ${SHADOW_SHADER} -o ${SPIRV_SHADOW}
COMMENT "Compiling shadow.vert vertex shadow.spv"
DEPENDS ${SHADOW_SHADER}
)
add_custom_target(CompileShaders ALL
DEPENDS ${SPIRV_VERT} ${SPIRV_FRAG} ${SPIRV_SHADOW}
)
然后尝试编译项目与着色器,确保没有错误。
管线与描述符布局
1. 管线模块
现在创建一个新的管线模块 ShadowPipeline.cppm,用于创建阴影渲染通道的图形管线。
module;
#include <memory>
#include <vector>
export module ShadowPipeline;
import vulkan_hpp;
import DataLoader;
import Utility;
import Device;
import ShadowRenderPass;
export namespace vht {
class ShadowPipeline {
std::shared_ptr<vht::Device> m_device;
std::shared_ptr<vht::ShadowRenderPass> m_shadow_render_pass;
vk::raii::DescriptorSetLayout m_descriptor_set_layout{ nullptr };
vk::raii::PipelineLayout m_pipeline_layout{ nullptr };
vk::raii::Pipeline m_pipeline{ nullptr };
public:
explicit ShadowPipeline(std::shared_ptr<vht::Device> device, std::shared_ptr<vht::ShadowRenderPass> shadow_render_pass)
: m_device(std::move(device)),
m_shadow_render_pass(std::move(shadow_render_pass)) {
create_descriptor_set_layout();
create_graphics_pipeline();
}
[[nodiscard]]
const vk::raii::DescriptorSetLayout& descriptor_set_layout() const { return m_descriptor_set_layout; }
[[nodiscard]]
const vk::raii::PipelineLayout& pipeline_layout() const { return m_pipeline_layout; }
[[nodiscard]]
const vk::raii::Pipeline& pipeline() const { return m_pipeline; }
private:
void create_descriptor_set_layout() {
......
}
// 创建图形管线
void create_graphics_pipeline() {
......
......
}
};
}
2. 描述符集布局
首先创建描述符集布局,包含一个绑定点用于传递光源信息。
void create_descriptor_set_layout() {
vk::DescriptorSetLayoutBinding light_ubo_layout_binging;
light_ubo_layout_binging.binding = 0;
light_ubo_layout_binging.descriptorType = vk::DescriptorType::eUniformBuffer;
light_ubo_layout_binging.descriptorCount = 1;
light_ubo_layout_binging.stageFlags = vk::ShaderStageFlagBits::eVertex;
vk::DescriptorSetLayoutCreateInfo layoutInfo;
layoutInfo.setBindings( light_ubo_layout_binging );
m_descriptor_set_layout = m_device->device().createDescriptorSetLayout( layoutInfo );
}
3. 创建图形管线
管线创建方式与之前类似。注意我们只需要顶点着色器,且不需要颜色附件和颜色混合阶段。
// 创建图形管线
void create_graphics_pipeline() {
const auto vertex_shader_code = vht::read_shader("shaders/shadow.spv");
const auto vertex_shader_module = vht::create_shader_module(m_device->device(), vertex_shader_code);
// 只需要顶点着色器
vk::PipelineShaderStageCreateInfo vertex_shader_create_info;
vertex_shader_create_info.stage = vk::ShaderStageFlagBits::eVertex;
vertex_shader_create_info.module = vertex_shader_module;
vertex_shader_create_info.pName = "main";
const std::vector<vk::PipelineShaderStageCreateInfo> shader_stages = { vertex_shader_create_info };
// 顶点输入状态(只需要顶点位置,不需要实例材质数据)
auto binding_description = vht::Vertex::get_binding_description();
auto attribute_description = vht::Vertex::get_attribute_description();
vk::PipelineVertexInputStateCreateInfo vertex_input;
vertex_input.setVertexBindingDescriptions(binding_description);
vertex_input.setVertexAttributeDescriptions(attribute_description);
// 输入装配状态
vk::PipelineInputAssemblyStateCreateInfo input_assembly;
input_assembly.topology = vk::PrimitiveTopology::eTriangleList;
// 视口与裁剪
// 直接使用静态状态,因为我们的深度图像大小不会变化
const vk::Viewport viewport(
0.0f, 0.0f, // x, y
static_cast<float>(m_shadow_render_pass->extent().width), // width
static_cast<float>(m_shadow_render_pass->extent().height), // height
0.0f, 1.0f // minDepth maxDepth
);
const vk::Rect2D scissor(
vk::Offset2D{0, 0}, // offset
m_shadow_render_pass->extent() // extent
);
vk::PipelineViewportStateCreateInfo viewport_state;
viewport_state.setViewports(viewport);
viewport_state.setScissors(scissor);
// 深度与模板测试
vk::PipelineDepthStencilStateCreateInfo depth_stencil;
depth_stencil.depthTestEnable = true;
depth_stencil.depthWriteEnable = true;
depth_stencil.depthCompareOp = vk::CompareOp::eLess;
// 光栅化器
vk::PipelineRasterizationStateCreateInfo rasterizer;
rasterizer.depthClampEnable = false;
rasterizer.rasterizerDiscardEnable = false;
rasterizer.polygonMode = vk::PolygonMode::eFill;
rasterizer.lineWidth = 1.0f;
// 注意此处不剔除(和主渲染一样剔除背面的话会出问题,但可以只剔除,让迷枵思考一会。。。)
rasterizer.cullMode = vk::CullModeFlagBits::eNone;
rasterizer.frontFace = vk::FrontFace::eCounterClockwise;
rasterizer.depthBiasEnable = false;
// 多重采样
vk::PipelineMultisampleStateCreateInfo multisampling;
multisampling.rasterizationSamples = vk::SampleCountFlagBits::e1;
multisampling.sampleShadingEnable = false; // default
// 管线布局,引用描述符集布局
vk::PipelineLayoutCreateInfo layout_create_info;
layout_create_info.setSetLayouts( *m_descriptor_set_layout );
m_pipeline_layout = m_device->device().createPipelineLayout( layout_create_info );
// 创建图形管线
vk::GraphicsPipelineCreateInfo create_info;
create_info.layout = m_pipeline_layout;
create_info.setStages( shader_stages );
create_info.pVertexInputState = &vertex_input;
create_info.pInputAssemblyState = &input_assembly;
create_info.pViewportState = &viewport_state;
create_info.pDepthStencilState = &depth_stencil;
create_info.pRasterizationState = &rasterizer;
create_info.pMultisampleState = &multisampling;
// 不需要颜色混合阶段
// 不需要管线动态状态
create_info.renderPass = m_shadow_render_pass->render_pass();
create_info.subpass = 0;
m_pipeline = m_device->device().createGraphicsPipeline( nullptr, create_info );
}
4. 依赖注入
我们至少有两个地方需要使用阴影管线,一个是 Drawer 模块,另一个是 Descriptor 模块。
现在需要为它们注入依赖,首先修改 Drawer.cppm 模块:
...
import ShadowPipeline;
...
class Drawer {
...
std::shared_ptr<vht::ShadowPipeline> m_shadow_pipeline{ nullptr };
...
std::shared_ptr<vht::ShadowPipeline> shadow_pipeline, // 构造函数参数
...
m_shadow_pipeline(std::move(shadow_pipeline)), // 构造函数初始化
...
};
然后是 Descriptor.cppm 模块:
...
import ShadowPipeline;
...
class Descriptor {
...
std::shared_ptr<vht::ShadowPipeline> m_shadow_pipeline{ nullptr };
...
std::shared_ptr<vht::ShadowPipeline> shadow_pipeline,
...
m_shadow_pipeline(std::move(shadow_pipeline)),
...
};
最后在 App.cppm 模块中初始化阴影管线,并修改上面两个模块对象的初始化语句:
...
import ShadowPipeline;
...
class App {
...
std::shared_ptr<vht::ShadowPipeline> m_shadow_pipeline{ nullptr };
...
init_shadow_pipeline();
std::cout << "shadow pipeline created" << std::endl;
...
void init_shadow_pipeline() { m_shadow_pipeline = std::make_shared<vht::ShadowPipeline>(m_device, m_shadow_render_pass); }
...
void init_descriptor() {
m_descriptor = std::make_shared<vht::Descriptor>(
...
m_shadow_pipeline,
...
);
}
void init_drawer() {
m_drawer = std::make_shared<vht::Drawer>(
...
m_shadow_pipeline,
...
);
}
};
现在请编译运行项目,确保没有错误。
描述符集
现在我们需要创建描述符集,以便在渲染阴影时传递光源信息。
1. 存储描述符
现在回到 Descriptor.cppm 模块,创建变量来存储阴影管线的描述符集。
class Descriptor {
...
// 添加成员变量
std::vector<vk::raii::DescriptorSet> m_shadow_sets;
...
// 对外接口
[[nodiscard]]
const std::vector<vk::raii::DescriptorSet>& shadow_sets() const { return m_shadow_sets; }
...
};
1. 修改描述符池
修改描述符池的创建代码,需要添加描述符的数量:
void create_descriptor_pool() {
std::array<vk::DescriptorPoolSize, 2> pool_sizes;
pool_sizes[0].type = vk::DescriptorType::eUniformBuffer;
// 一份 UBO + 2 份 Light UBO
pool_sizes[0].descriptorCount = static_cast<uint32_t>(MAX_FRAMES_IN_FLIGHT * 3);
......
// 两个管线都需要 MAX_FRAMES_IN_FLIGHT
poolInfo.maxSets = static_cast<uint32_t>(MAX_FRAMES_IN_FLIGHT * 2);
m_pool = m_device->device().createDescriptorPool(poolInfo);
}
注意描述符集的最大数量和描述符的数量都需要修改。
2. 创建描述符集布局
void create_descriptor_sets() {
// 为阴影管线创建描述符集布局
std::vector<vk::DescriptorSetLayout> shadow_layouts(MAX_FRAMES_IN_FLIGHT, *m_shadow_pipeline->descriptor_set_layout());
vk::DescriptorSetAllocateInfo shadow_alloc_info;
shadow_alloc_info.descriptorPool = m_pool;
shadow_alloc_info.setSetLayouts( shadow_layouts );
m_shadow_sets = m_device->device().allocateDescriptorSets(shadow_alloc_info);
for (size_t i = 0; i < MAX_FRAMES_IN_FLIGHT; ++i) {
vk::DescriptorBufferInfo shadow_light_buffer_info;
shadow_light_buffer_info.buffer = m_light_uniform_buffer->buffers()[i];
shadow_light_buffer_info.offset = 0;
shadow_light_buffer_info.range = sizeof(LightUBO);
vk::WriteDescriptorSet write;
write.dstSet = m_shadow_sets[i];
write.dstBinding = 0;
write.dstArrayElement = 0;
write.descriptorType = vk::DescriptorType::eUniformBuffer;
write.setBufferInfo(shadow_light_buffer_info);
m_device->device().updateDescriptorSets(write, nullptr);
}
// 第二个管线的描述符集
......
......
}
现在再次运行程序,确保没有错误。
绘制命令记录
现在回到 Drawer.cppm 模块,修改命令缓冲的记录,添加“阴影”渲染通道的绘制命令。
// 记录命令缓冲区
void record_command_buffer(const vk::raii::CommandBuffer& command_buffer, const uint32_t image_index) const {
// 开始记录命令缓冲区
command_buffer.begin( vk::CommandBufferBeginInfo{} );
// 记录阴影渲染通道的命令
vk::RenderPassBeginInfo shadow_pass_begin_info;
shadow_pass_begin_info.renderPass = m_shadow_render_pass->render_pass();
// 注意这里的帧缓冲区是阴影渲染通道的帧缓冲,使用 current_frame 索引而不是 image_index
shadow_pass_begin_info.framebuffer = m_shadow_render_pass->framebuffers()[m_current_frame];
shadow_pass_begin_info.renderArea.offset = vk::Offset2D{0, 0};
shadow_pass_begin_info.renderArea.extent = m_shadow_render_pass->extent(); // 注意这里使用阴影渲染通道的尺寸
constexpr vk::ClearValue shadow_clear_color = vk::ClearDepthStencilValue{ 1.0f ,0 };
shadow_pass_begin_info.setClearValues( shadow_clear_color );
command_buffer.beginRenderPass( shadow_pass_begin_info, vk::SubpassContents::eInline );
command_buffer.bindPipeline( vk::PipelineBindPoint::eGraphics, m_shadow_pipeline->pipeline() );
// 我们使用了静态视口与裁剪,因此此处无需设置
const std::vector<vk::Buffer> shadow_vertex_buffers = { *m_input_assembly->vertex_buffer() };
constexpr std::array<vk::DeviceSize,1> shadow_offsets = { 0 };
command_buffer.bindVertexBuffers( 0, shadow_vertex_buffers, shadow_offsets );
command_buffer.bindIndexBuffer( m_input_assembly->index_buffer(), 0, vk::IndexType::eUint32 );
command_buffer.bindDescriptorSets(
vk::PipelineBindPoint::eGraphics,
m_shadow_pipeline->pipeline_layout(),
0,
*m_descriptor->shadow_sets()[m_current_frame],
nullptr
);
command_buffer.drawIndexed(static_cast<uint32_t>(m_data_loader->indices().size()), 1, 0, 0, 0);
command_buffer.endRenderPass();
// 记录主渲染通道的命令,没有任何修改
......
......
command_buffer.end();
}
重点注意,这里的渲染渲染范围使用的是阴影深度图像的大小,而非交换链图像的大小。
现在编译运行程序,确保没有错误。
图像采样描述符
现在我们的视频效果还没有变化,因为我们还没有修改主渲染的代码。 首先,我们需要让主渲染的着色器能够读取阴影深度图像,需要创建图像与采样器描述符。
1. 描述符布局
首先修改 GraphicsPipeline.cppm 模块,添加一个新的描述符布局,用于传递阴影深度图像和采样器。
// 创建描述符集布局
void create_descriptor_set_layout() {
...
// 这里依然使用组合图像采样器描述符
vk::DescriptorSetLayoutBinding depth_map_layout_binding;
depth_map_layout_binding.binding = 3;
depth_map_layout_binding.descriptorType = vk::DescriptorType::eCombinedImageSampler;
depth_map_layout_binding.descriptorCount = 1;
depth_map_layout_binding.stageFlags = vk::ShaderStageFlagBits::eFragment;
auto bindings = {
ubo_layout_binging,
sampler_layout_binding,
light_ubo_layout_binging,
depth_map_layout_binding // 添加深度图像采样器描述符
};
...
}
2. 分配描述符集合
在 Descriptor.cppm 模块中,首先修改描述符池的配置,添加深度图像采样器的描述符数量:
void create_descriptor_pool() {
...
pool_sizes[1].descriptorCount = static_cast<uint32_t>(MAX_FRAMES_IN_FLIGHT * 2); // 纹理采样器 + 阴影贴图
...
}
然后在 create_descriptor_sets 方法中,添加深度图像采样器的描述符集:
import ShadowDepthImage; // 导入模块
...
class Descriptor {
...
std::shared_ptr<vht::ShadowDepthImage> m_shadow_depth_image{ nullptr }; // 添加成员变量
...
std::shared_ptr<vht::ShadowDepthImage> shadow_depth_image, // 构造函数参数
...
m_shadow_depth_image(std::move(shadow_depth_image)), // 构造函数初始化
...
void create_descriptor_sets() {
// 第一个管线的描述符集,略
...
// 主渲染管线的描述符集
......
// 添加深度图像采样器描述符信息
vk::DescriptorImageInfo depth_map_info;
depth_map_info.imageLayout = vk::ImageLayout::eShaderReadOnlyOptimal;
depth_map_info.imageView = m_shadow_depth_image->image_views()[i];
depth_map_info.sampler = m_shadow_depth_image->sampler();
// 增加数组元素
std::array<vk::WriteDescriptorSet, 4> writes;
...
writes[3].dstSet = m_sets[i];
writes[3].dstBinding = 3;
writes[3].dstArrayElement = 0;
writes[3].descriptorType = vk::DescriptorType::eCombinedImageSampler;
writes[3].setImageInfo(depth_map_info);
...
}
};
别忘了修改 App.cppm 中 Descriptor 的构造函数,添加 ShadowDepthImage 的依赖注入:
void init_descriptor() {
m_descriptor = std::make_shared<vht::Descriptor>(
...
m_shadow_depth_image,
...
);
}
3. 片段着色器
现在我们需要修改主渲染管线的片段着色器 shader.frag ,先尝试添加描述符,测试是否可以编译通过:
// ......
// 添加阴影深度图像采样器
layout(binding = 3) uniform sampler2D depthSampler;
// ......
然后尝试编译和运行项目,确保没有错误。
片段着色器逻辑
现在来到最后一步,我们需要在片段着色器中实现阴影映射的逻辑。
void main() {
// 计算光源空间坐标
vec4 lightSpacePos = ubo.proj * ubo.view * ubo.model * vec4(fragPos, 1.0);
vec3 projCoords = lightSpacePos.xyz / lightSpacePos.w;
projCoords.xy = projCoords.xy * 0.5 + 0.5; // 将 x,y 转换到[0,1]区间
float shadow = 0.0; // 光照范围之外直接设为 0
if(projCoords.x > 0.0 && projCoords.x < 1.0 && projCoords.y > 0.0 && projCoords.y < 1.0) {
float closestDepth = texture(depthSampler, projCoords.xy).r;
float currentDepth = projCoords.z;
// 阴影判断
float bias = 0.008;
shadow = currentDepth - bias > closestDepth ? 0.5 : 1.0; // 0.5表示阴影,1.0表示光照
}
// ... Phong 光照计算逻辑
// 最终色彩,乘以光照和阴影
vec3 result = (ambient + shadow * (diffuse + specular)) * objectColor;
result = min(result, vec3(1.0));
outColor = vec4(result, 1.0);
}
顶点着色器向片段着色器传递了顶点位置 fragPos,我们通过光源的 MVP 矩阵将其转换到光源视角下的坐标系。
然后将顶点与光源的距离(Z分量)与深度图像中存储的距离进行比较,判断该片元是否被其他物体遮挡。
MVP 变换后的坐标可能在 [0,1] 之外,我们仅考虑范围内的顶点。
最后
现在编译运行程序,你应该可以看到阴影效果了:
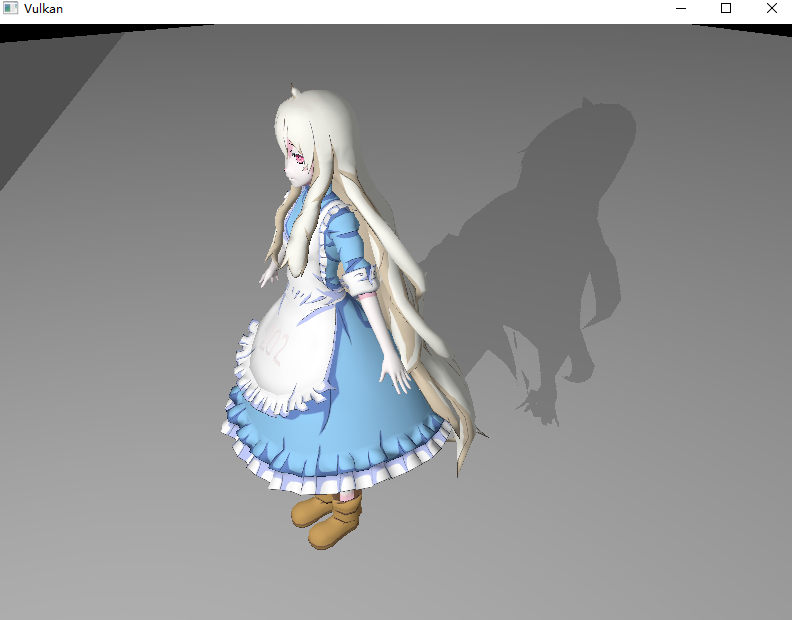
如果你仔细观察,可能发现小腿后面没有阴影。这在 GAMES202 课程中有提到,是我们着色器中的 bias 设置过大导致的,你可以尝试降低 bias 的值来改善这个问题。
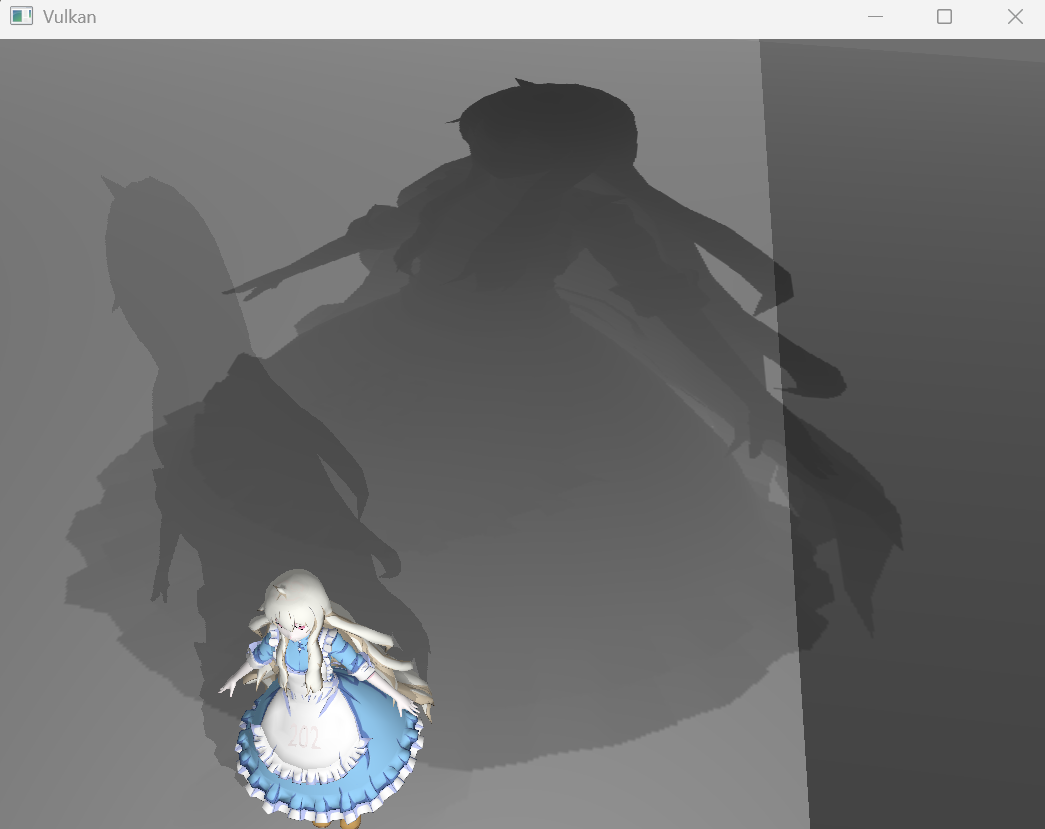
你可能好奇深度图是什么样子,这里提供一种简单的呈现方式。
注意到地面没有绘制纹理,而它的纹理坐标正是 [0.0,0.0] - [1.0,1.0],我们可以修改地面的着色逻辑,让它呈现深度图的内容:
// 原先,根据推送常量觉得是否采样纹理,地面使用固定色彩
// vec3 objectColor = pc.enableTexture == 1 ? texture(texSampler, fragTexCoord).rgb : vec3(0.5, 0.5, 0.5);
// 修改后,地面采样深度图形
float depth = texture(depthSampler, fragTexCoord.xy).r;
depth = (depth - 0.90) * 10.0; // 让深度图效果更明显
depth = pow(depth, 6.0); // 让深度图效果更明显
vec3 objectColor = pc.enableTexture == 1 ? texture(texSampler, fragTexCoord).rgb : vec3(depth, depth, depth);
上面通过截断放大和幂运算来增强深度图的可视化效果,如果你不这么做,深度差异过小将导致地面全白看不出差异。
作为进阶章节,作者希望你能实现更多扩展功能,例如:
- 实现光源位置的动态变化。
- 改进阴影效果,例如使用 PCF/PCSS 来平滑阴影边缘。