加载3D模型
前言
经过前面的内容,程序已经可以渲染三维网格体了。这一章节我们将从模型文件中加载顶点和索引,而不再硬编码于 C++ 代码中。
我们将使用 OBJ 格式的模型文件,它非常简单且易于使用。 部分教程会让用户自己写一个 OBJ 解析器,但我们将重点放在 Vulkan 上,而不是模型文件的解析。
库
我们将使用 tinyobjloader 库用于加载 OBJ 文件的数据。 它像 stb_image 一样是单头文件库,你可以直接去仓库下载此文件,但我们依然使用 vcpkg 安装。
vcpkg install tinyobjloader
然后在 CMakeLists.txt 中导入库:
find_package(tinyobjloader CONFIG REQUIRED)
...
target_link_libraries(${PROJECT_NAME} PRIVATE tinyobjloader::tinyobjloader)
示例网格
本章中我们依然不启用光照系统,所以我们将使用把光照烘焙到纹理上的模型。
本文档将使用 Vulkan Tutorial 中提供的模型文件,可以直接点击下方的链接下载:
{kind=link}
你可以使用任何自己喜欢的模型文件,但请确保它是 OBJ 格式,并且包含纹理图像。 如果模型尺寸差异过大,你可能需要自行调整 MVP 矩阵的参数。
现在在 shaders 和 textures 旁创建新文件夹 models,将 OBJ 文件放入此文件夹,将纹理图像放入 textures 文件夹。
在程序中添加两个新的配置变量,用于定义模型和纹理路径:
const std::string MODEL_PATH = "models/viking_room.obj";
const std::string TEXTURE_PATH = "textures/viking_room.png";
这些路径默认是相对于程序运行时的工作目录解析的。若你不是在项目根目录下运行程序,请确保资源被拷贝到了对应位置,或自行改成正确的资源路径。
并更新 createTextureImage 以使用此路径变量:
stbi_uc* pixels = stbi_load(TEXTURE_PATH.c_str(), &texWidth, &texHeight, &texChannels, STBI_rgb_alpha);
然后你可以直接运行程序,看看是否能正常加载纹理图片。
前置准备
1. 修改顶点和索引变量
我们现在需要从模型中加载数据,顶点和索引不能再作为全局常量了。 现在将他们修改为成员变量:
std::vector<Vertex> m_vertices;
std::vector<uint32_t> m_indices;
vk::raii::DeviceMemory m_vertexBufferMemory{ nullptr };
vk::raii::Buffer m_vertexBuffer{ nullptr };
注意我们修改了变量名,加了 m_前缀用于区分是不是成员变量,现在需要修改几处地方:
void recordCommandBuffer( ... ) {
...
commandBuffer.drawIndexed(static_cast<uint32_t>(m_indices.size()), 1, 0, 0, 0);
...
}
void createVertexBuffer() {
const vk::DeviceSize bufferSize = sizeof(Vertex) * m_vertices.size();
...
memcpy(data, m_vertices.data(), bufferSize);
...
}
void createIndexBuffer() {
const vk::DeviceSize bufferSize = sizeof(uint32_t) * m_indices.size();
...
memcpy(data, m_indices.data(), bufferSize);
...
}
2. 导入库
tinyobjloader 库的导入和 STB 基本一致,导入 tiny_obj_loader.h 头文件并在前面加上 TINYOBJLOADER_IMPLEMENTATION,保证头文件包含函数主体,避免链接错误。
#define TINYOBJLOADER_IMPLEMENTATION
#include <tiny_obj_loader.h>
加载模型数据
1. 辅助函数
现在创建一个 loadModel 函数用于加载顶点和索引数据。它应该在顶点缓冲创建之前执行:
void initVulkan() {
...
loadModel();
createVertexBuffer();
createIndexBuffer();
...
}
...
void loadModel() {
}
2. 加载模型
使用 tinyobj::LoadObj 函数加载模型:
void loadModel() {
tinyobj::attrib_t attrib;
std::vector<tinyobj::shape_t> shapes;
std::vector<tinyobj::material_t> materials;
std::string warn, err;
if (!tinyobj::LoadObj(&attrib, &shapes, &materials, &warn, &err, MODEL_PATH.c_str())) {
throw std::runtime_error(warn + err);
}
}
OBJ 文件由位置、法线、纹理坐标和面组成。 面由任意数量的顶点组成,其中每个顶点通过索引引用位置、法线和纹理坐标。 这使得不仅可以重用整个顶点,还可以重用单个属性。
attrib 容器在其 attrib.vertices、attrib.normals 和 attrib.texcoords 向量中保存所有位置、法线和纹理坐标。
shapes 容器包含所有单独的对象及其面。每个面都由一个顶点数组组成,并且每个顶点都包含位置、法线和纹理坐标属性的索引。
OBJ 模型还可以为每个面定义材质和纹理,但我们暂时忽略这些。
err 字符串包含错误,warn 字符串包含加载文件时发生的警告,例如缺少材质定义。
仅当 LoadObj 函数返回 false 时,加载才真正失败。
如上所述,OBJ 文件中的面实际上可以包含任意数量的顶点,而我们的应用程序只能渲染三角形。
幸运的是,LoadObj 有一个可选参数可以自动三角化这些面,默认情况下启用该参数。
我们将文件中的所有面组合成一个模型,因此只需遍历所有 shape
for (const auto& shape : shapes) {
}
三角化功能已经确保每个面有三个顶点,因此我们现在可以直接迭代顶点并将它们直接转储到我们的 vertices 向量中
for (const auto& shape : shapes) {
for (const auto& index : shape.mesh.indices) {
Vertex vertex{};
m_vertices.push_back(vertex);
m_indices.push_back(m_indices.size());
}
}
为了简单起见,我们现在假设每个顶点都是唯一的,因此 m_indices 使用简单的自增索引。
index 变量的类型为 tinyobj::index_t,其中包含 vertex_index、normal_index 和 texcoord_index成员。
我们需要使用这些索引在 attrib 数组中查找实际的顶点属性
vertex.pos = {
attrib.vertices[3 * index.vertex_index + 0],
attrib.vertices[3 * index.vertex_index + 1],
attrib.vertices[3 * index.vertex_index + 2]
};
vertex.texCoord = {
attrib.texcoords[2 * index.texcoord_index + 0],
attrib.texcoords[2 * index.texcoord_index + 1]
};
vertex.color = {1.0f, 1.0f, 1.0f};
3. 测试与调整
现在运行程序,您应该看到类似以下内容:
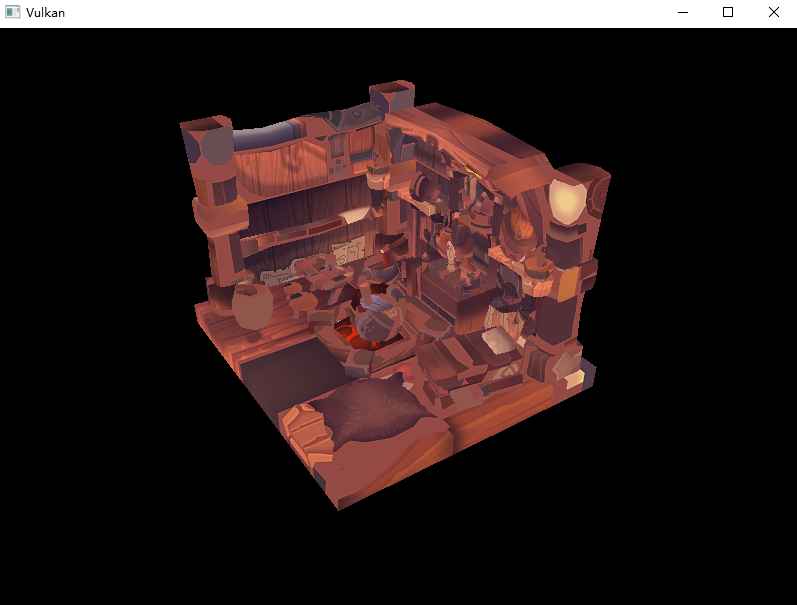
太棒了,几何体看起来是正确的,但是纹理似乎有些问题。 OBJ 格式假定一个坐标系,其中垂直坐标 0 表示图像的底部,但是我们使用 Vulkan 坐标系 0 表示图像的顶部。 通过翻转纹理坐标的垂直分量来解决此问题
vertex.texCoord = {
attrib.texcoords[2 * index.texcoord_index + 0],
1.0f - attrib.texcoords[2 * index.texcoord_index + 1]
};
再次运行程序时,您现在应该看到正确的结果
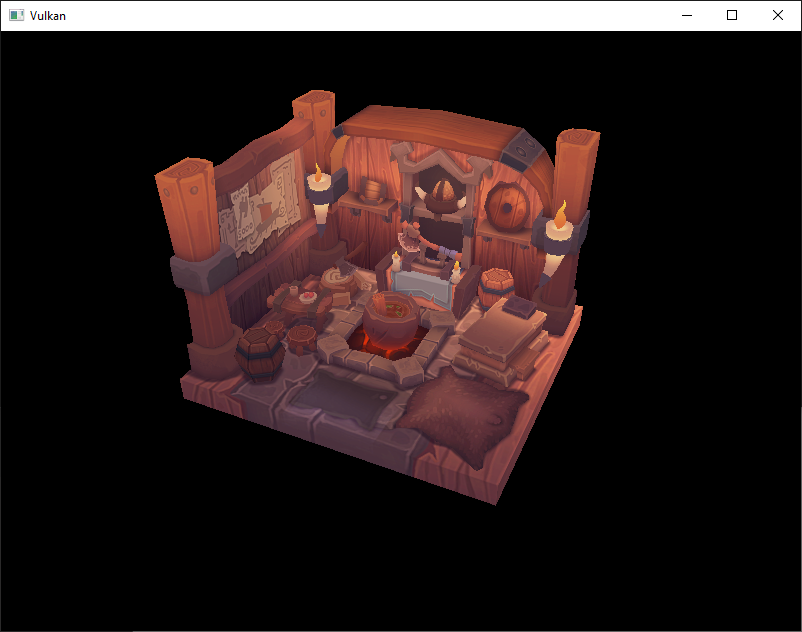
当模型旋转时,您可能会注意到后部(墙壁的背面)看起来有点奇怪。 这是正常的,因为模型删除了背面细节,而我们启用了图元的背面剔除。
顶点去重
上面的代码中,我们使用自增索引,给每个面的每个点都记录了相关信息,并没有真正利用到索引缓冲区。
此时 vertices 向量包含大量重复的顶点数据,而我们应该去除重复顶点,并通过索引重用它们。
一种直接的方式是使用map或者unordered_map来跟踪唯一的顶点和相应的索引。
1. map
本节将直接使用 map ,它更加简单,但实际效率可能不如 unordered_map。
#include <map>
std::map<Vertex, uint32_t> uniqueVertices;
for (const auto& shape : shapes) {
for (const auto& index : shape.mesh.indices) {
Vertex vertex;
vertex.pos = {
attrib.vertices[3 * index.vertex_index + 0],
attrib.vertices[3 * index.vertex_index + 1],
attrib.vertices[3 * index.vertex_index + 2]
};
vertex.texCoord = {
attrib.texcoords[2 * index.texcoord_index + 0],
1.0f - attrib.texcoords[2 * index.texcoord_index + 1]
};
vertex.color = {1.0f, 1.0f, 1.0f};
if (!uniqueVertices.contains(vertex)) {
uniqueVertices[vertex] = static_cast<uint32_t>(m_vertices.size());
m_vertices.push_back(vertex);
}
m_indices.push_back(uniqueVertices[vertex]);
}
}
每次我们从 OBJ 文件读取顶点时,都会检查之前是否已经有完全一样的顶点。
如果是新顶点,就加入 uniqueVertices 中。最后再从 uniqueVertices 读取顶点索引。
注意
uniqueVertices是函数局部变量。 此处map的使用可以优化,减少一次查找次数,但我们使用最简单的写法。
2. 自定义比较
现在程序无法通过编译,因为自定义类型没有重置比较运算符,
map只需要提供<运算符重载即可。unordered_map则需要==和std::hash<>特化。
我们可以只重载 < 运算符,因为标准库的排序都依赖此运算符。
或者使用 C++20 的“宇宙飞船运算符”
<=>并配合==,它们可以自动生成所有比较运算符。
#include <tuple>
...
struct Vertex {
glm::vec3 pos;
glm::vec3 color;
glm::vec2 texCoord;
......
bool operator<(const Vertex& other) const {
return std::tie(pos.x, pos.y, pos.z, color.x, color.y, color.z, texCoord.x, texCoord.y)
< std::tie(other.pos.x, other.pos.y, other.pos.z, other.color.x, other.color.y, other.color.z, other.texCoord.x, other.texCoord.y);
}
};
最后
您现在应该能够成功编译并运行您的程序。
如果您输出 vertices 的大小,您将看到它从 11484 缩小到 3566!
这意味着每个顶点在平均约 3 个三角形中被重用,为我们节省了大量内存。